

GITAI Autonomous Robotic Arm Arrives at Space Station
Will Conduct ISAM External Tech-Demo

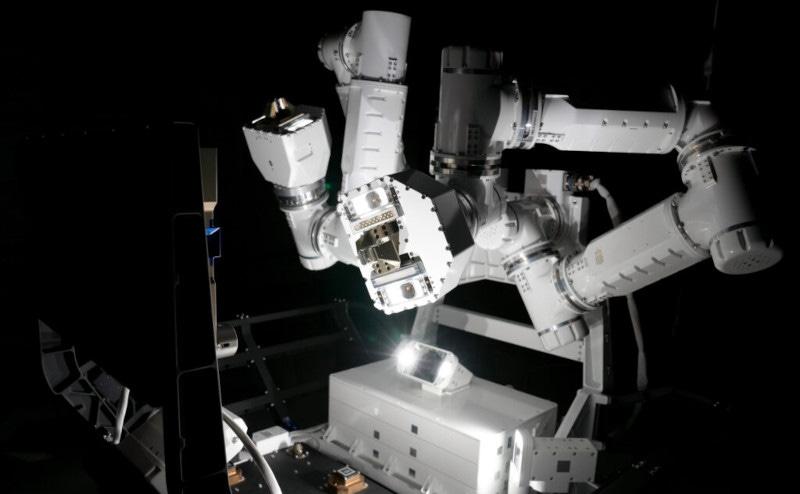
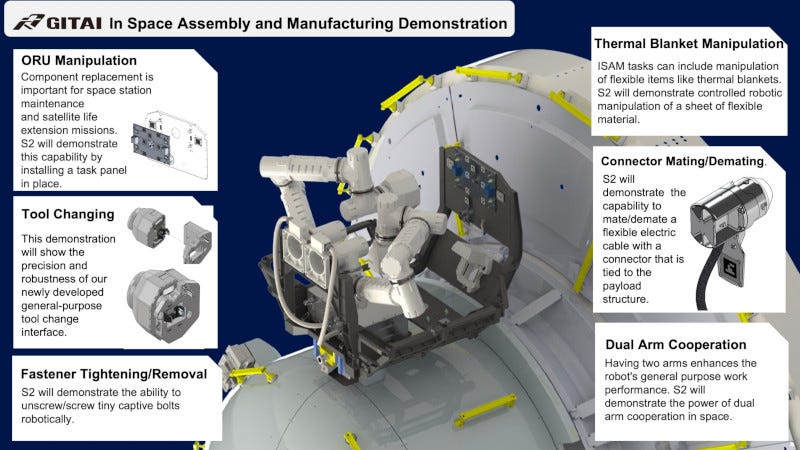
A five-foot-long autonomous dual robotic arm system (S2) developed by GITAI has successfully arrived today to the International Space Station (ISS) aboard the SpaceX Falcon 9 rocket (NG-20), The device will conduct an external demonstration of in-space servicing, assembly, and manufacturing (ISAM) while onboard the ISS.
“We’re actively developing a spacecraft capable of performing rendezvous, repair, inspection, and life extension services for customers’ satellites."
Sho Nakanose, GITAI
The success of the S2 tech-demo will be a major milestone for GITAI, confirming the feasibility of this technology as a fully operational system in space, the company says.
The S2 is a robot that embodies the essence of GITAI’s robotics technology, incorporating the same fundamental technology used in the company’s innovative Inchworm Robot and Lunar Rover. During the demonstration, the S2 dual robotic arm system will be mounted external to the ISS on the Nanoracks Bishop Airlock and will perform on-orbit services, including maintenance, inspection, and life-extension operations for satellites.
“It was a thrilling experience watching S2 launch on the SpaceX (NG-20) mission and successfully dock at the Space Station for GITAI’s second demonstration,” said Sho Nakanose, Founder and CEO of GITAI. “We’re actively developing a spacecraft capable of performing rendezvous, repair, inspection, and life extension services for customers’ satellites, and this tech-demo will confirm the feasibility of our core technology for the ISAM services we’re looking to offer commercial and government customers.”
GITAI successfully passed the NASA safety reviews last August (2023) as a requirement for S2’s external tech-demo set to take place onboard the ISS expected in Q1 2024. By demonstrating this technology in space, GITAI aims to achieve Technology Readiness Level (TRL) 7 and establish ISAM capabilities.
The S2 is the second demonstration mission for GITAI onboard the ISS. In 2021, GITAI successfully completed a technology demonstration of its S1 autonomous space robot and succeeded in executing two tasks: assembling structures and panels for In-Space Assembly (ISA), and operating switches & cables for Intra-Vehicular Activity (IVA).